Suite de l'étude précédente :
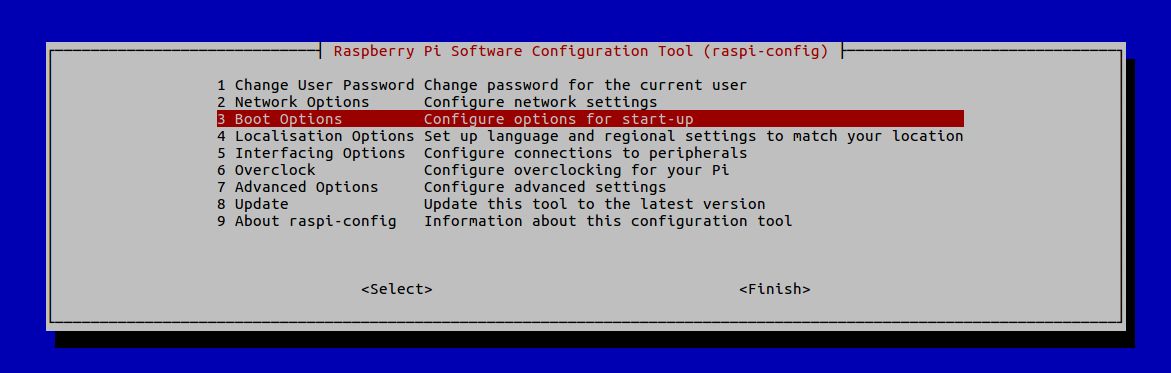
Bien ! Maintenant que le système est installé, il nous faut un programme pour exploiter la mini-borne, et ainsi automatiser l'affichage des vidéos.
1 - Playlist de vidéos et pilotage par GPIO :
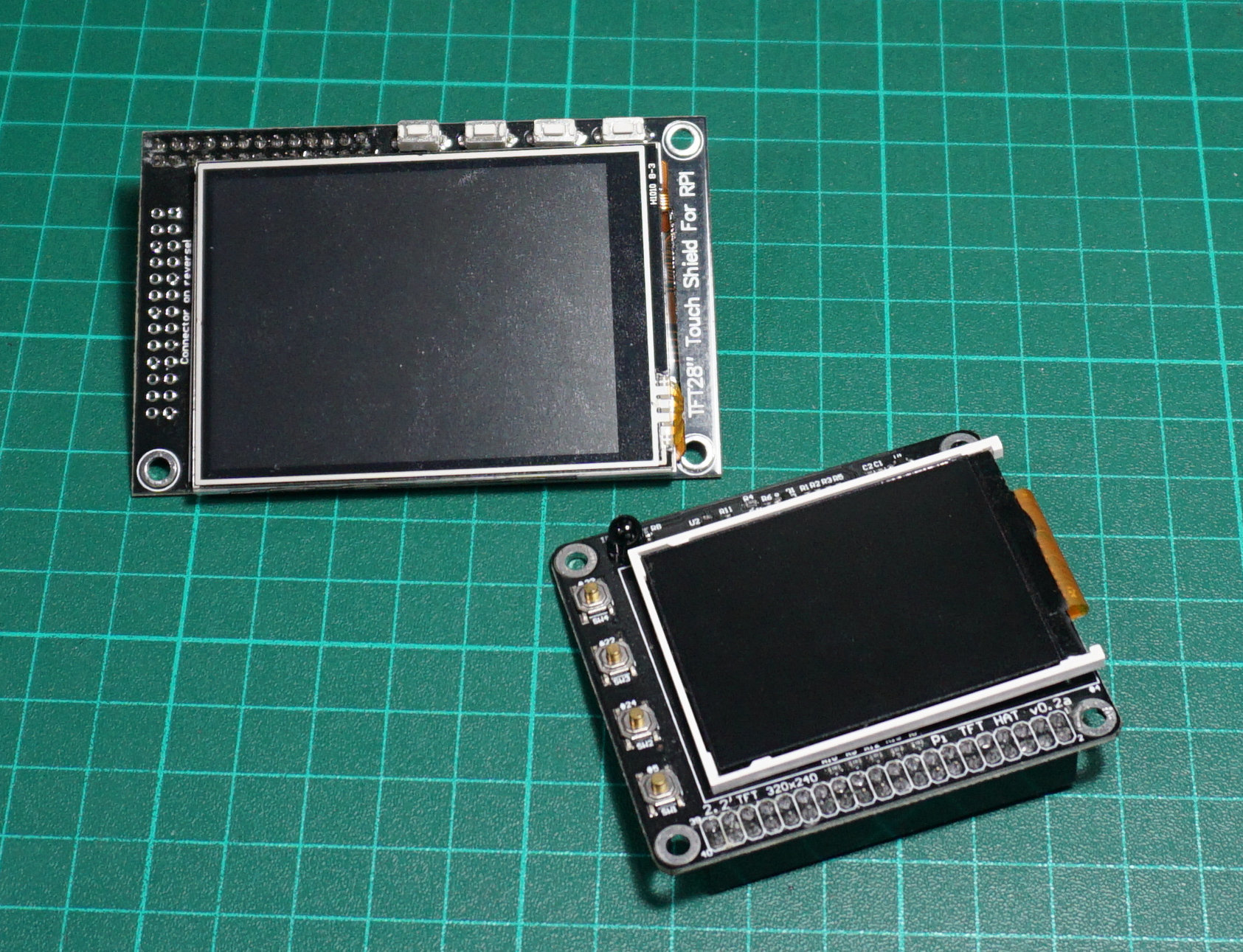
- Il faut voir mes petites bornes comme des judebox à jeux vidéos, qui jouent une vidéo en boucle.
- Sur la carte SD sont stockées plusieurs vidéos de démo de jeux ou de parties enregistrées.
- Les vidéos sont jouées par un script Python, et il est alors possible d'interagir avec la vidéo qui joue. Ainsi on va pouvoir :
- augmenter/diminuer le volume sonore, à l'aide de deux boutons poussoir.
- augmenter/diminuer la luminosité de l'écran, à l'aide de ces même deux boutons, avec un appuie long (> 2s).
- sauter de 30 secondes en avant/arrière, à l'aide de deux autres boutons poussoir.
- jouer la vidéo suivante/précédente, à l'aide de ces même de deux autres boutons, avec un appuie long (> 2s).
- faire une pause/relancer la lecture de la vidéo, à l'aide du bouton dédié.
- Voici dores et déjà une petite vidéo de démonstration pour bien comprendre l'idée :
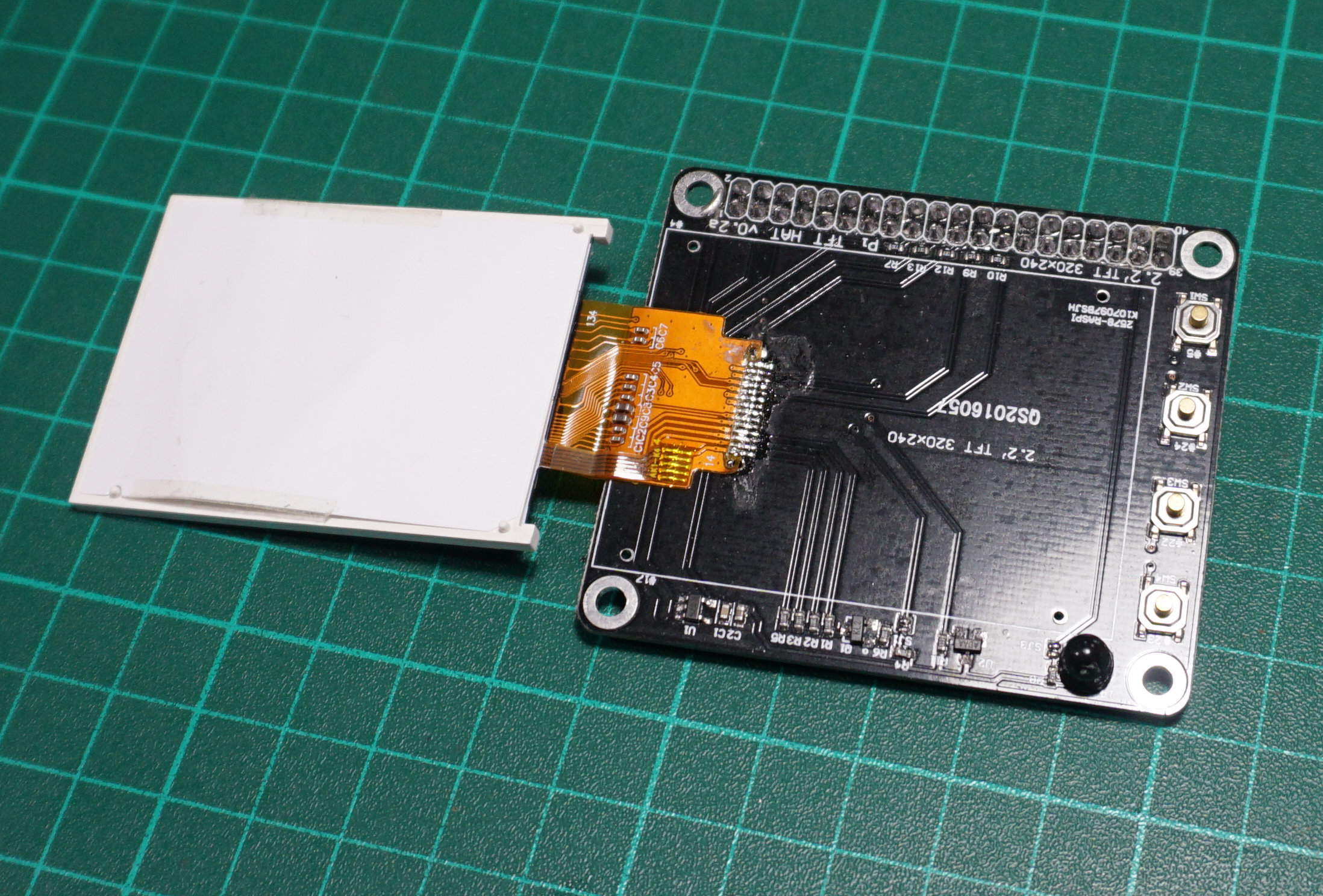
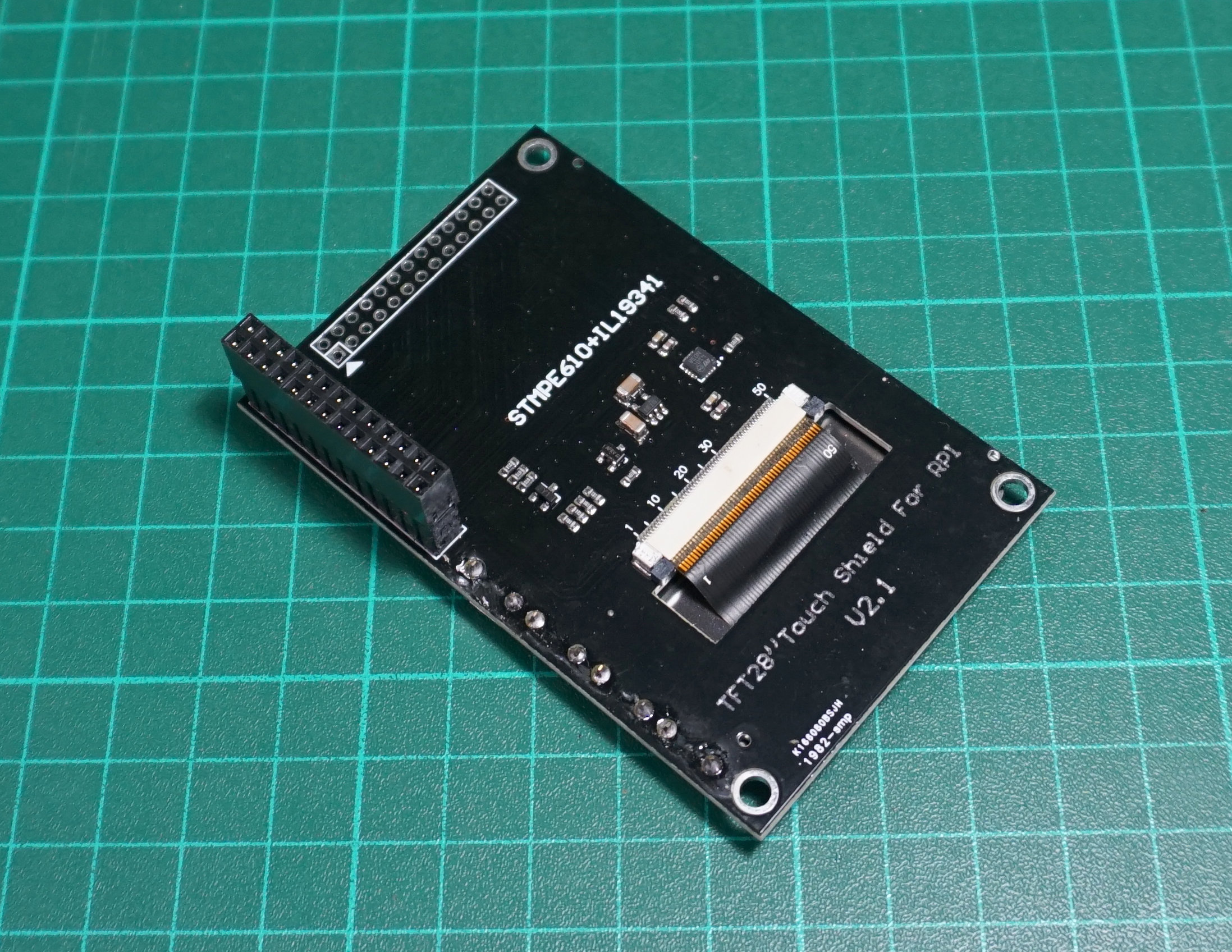
- Et donc, pour ce faire, voici le schéma de câblage des boutons aux GPIO :
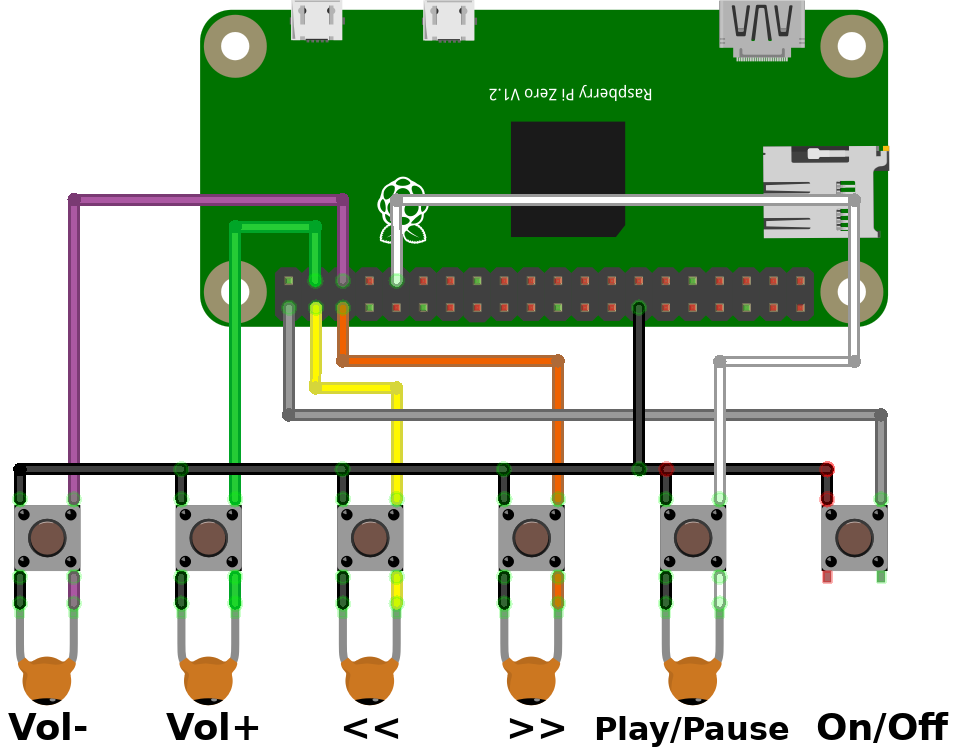
C'est le dessin du RaspberryPi Zero qui est représenté, mais les câbles (cf. la vidéo) sont bien raccordés sur le Pi HAT (cf. le schéma structurel). Les condensateurs d'anti-rebond font 100nF.
Il ne reste plus qu'a programmer…