Suite de l'épisode précédent :
Il y a 10 ans donc… La borne avait été remise en service pour être fonctionnelle.
Cependant, chaque fois que je la voyais, je me disais qu'elle méritait mieux, notamment pour son panel, ce qui coïncidait avec mon envie de faire des petits trous dans du métal.
Allez, je vais « outer » le truc :P : J'adore la perceuse à colonne, et voici une occasion de m'en servir !
Préparatifs :
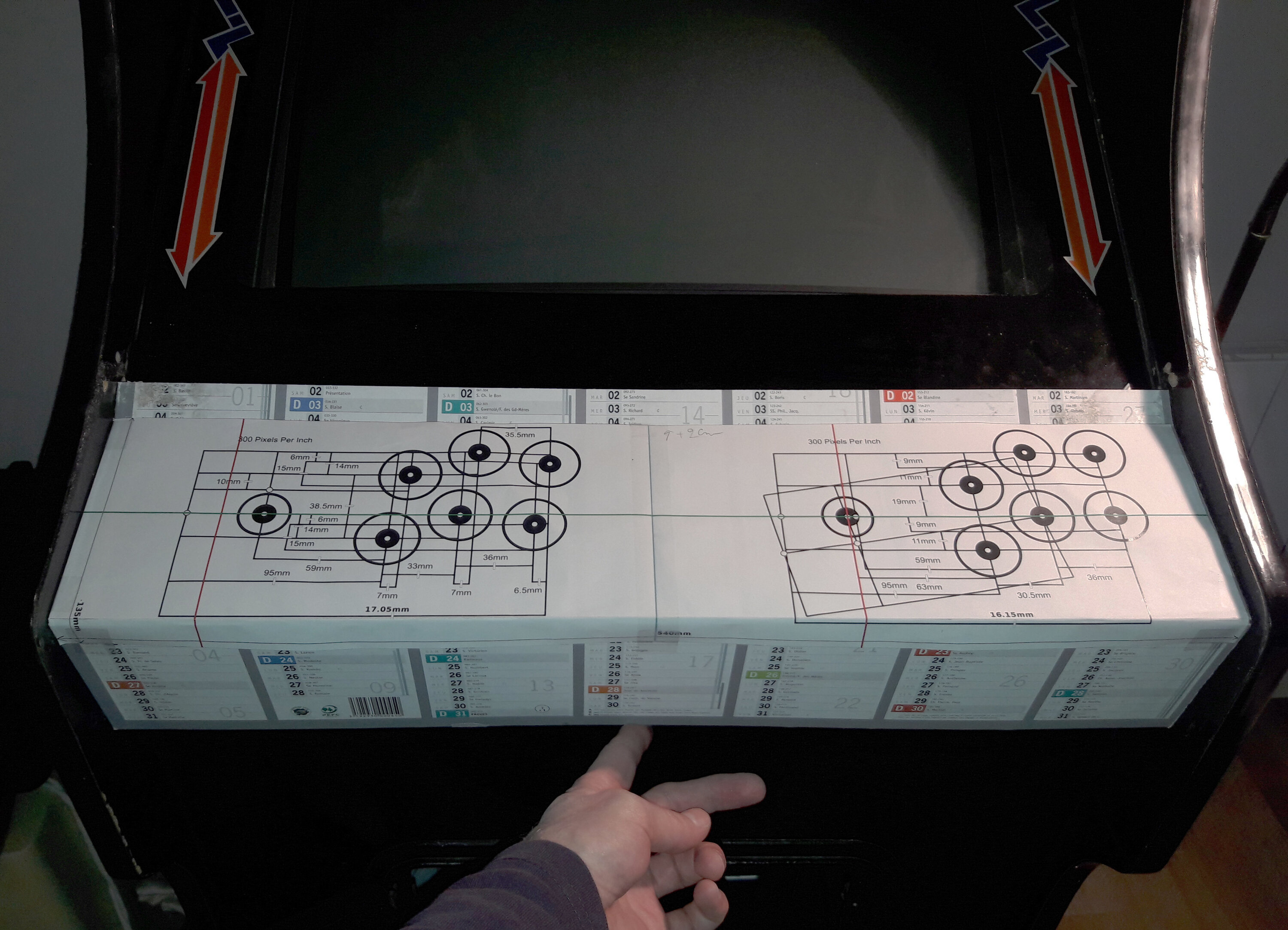
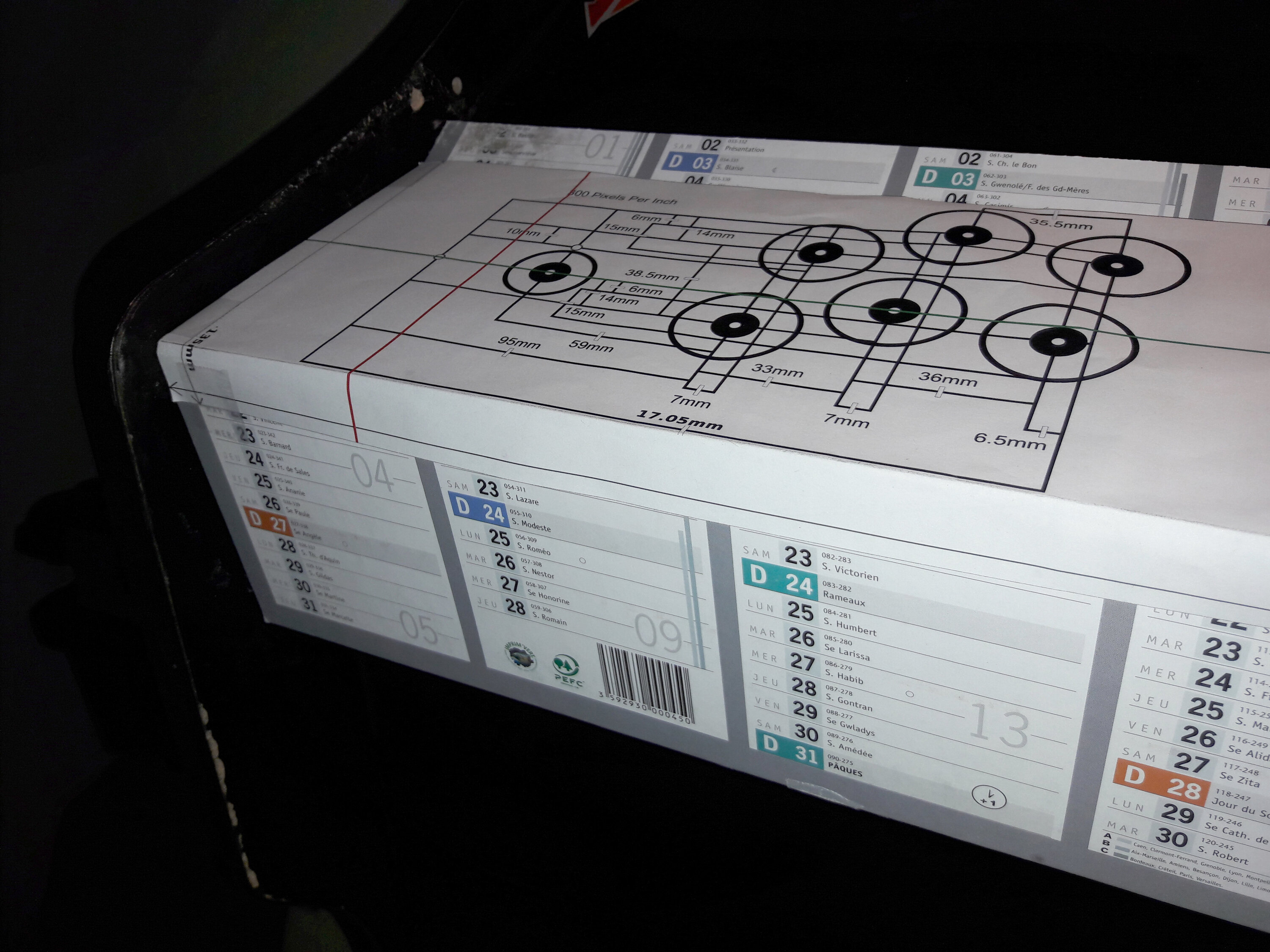
- Premier truc à faire, aller prendre des mesures sur place, et tenter de comprendre comment reposait et était fixé le panel d'origine.


- Après avoir dessiné un petit plan et réalisé une maquette en carton, j'ai pu confronter la chose afin de vérifier l'exactitude de l'ensemble.


Découpe du métal :
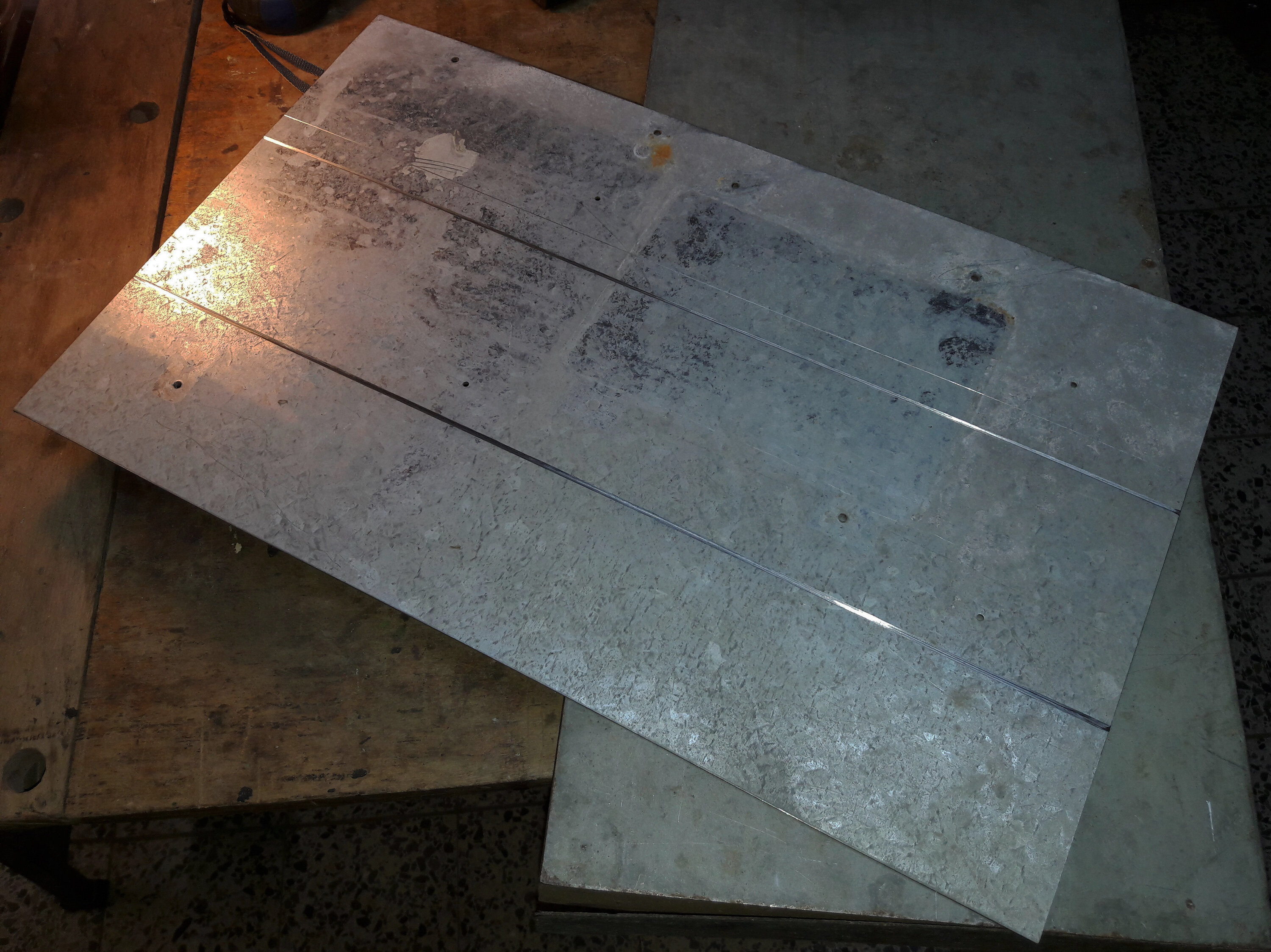
 Nous avons pu trouver une plaque d'acier (que je soupçonne galvanisée) qui traînait, de 2 mm d'épaisseur, pile ce qui est requis pour optimiser la rigidité de l'ouvrage !
Nous avons pu trouver une plaque d'acier (que je soupçonne galvanisée) qui traînait, de 2 mm d'épaisseur, pile ce qui est requis pour optimiser la rigidité de l'ouvrage !
- Avec la technique habituelle et une bonne lame de scie, découpe de la plaque pour une largeur de 54,3 cm. On découpera le reste plus tard.


Pliage du métal :
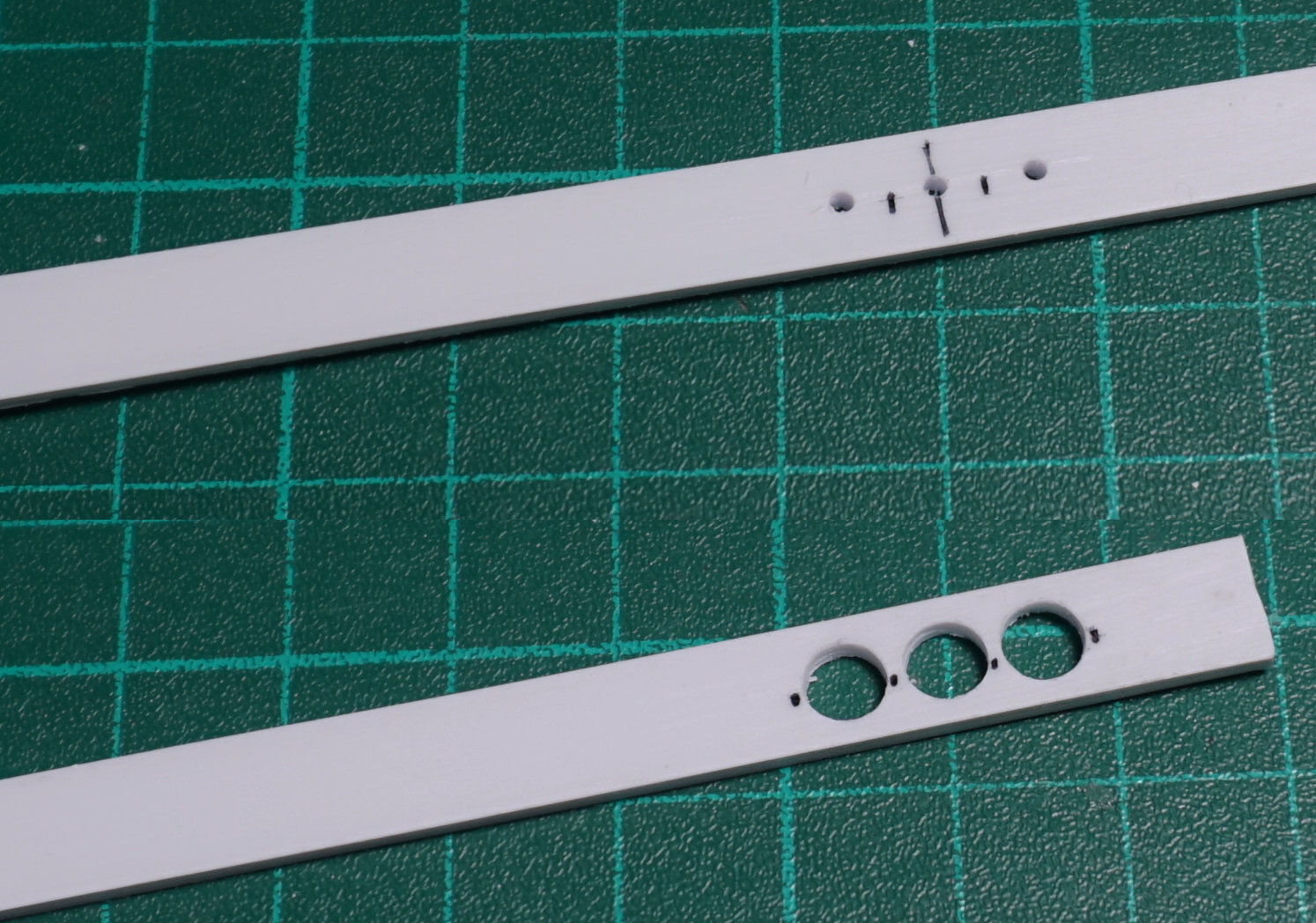
- Afin de faciliter et guider le pliage artisanal qui va suivre, il faut retirer un peu de matière en pratiquant une rainure, suivant les traits de pliage qui ont étés marqués. Pour ce faire cette mini-tronçonneuse s’avéra très pratique !